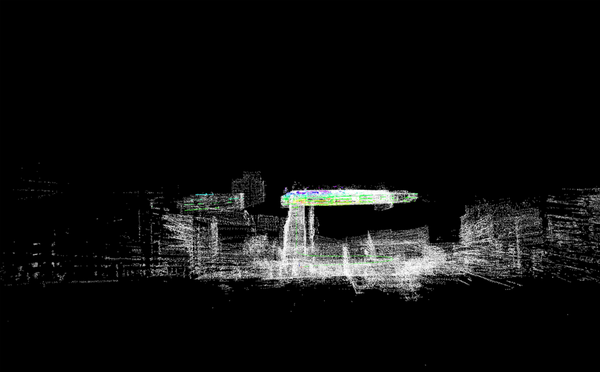
산학연구 LIDAR SLAM으로 얻은 Trajectory를 기준으로 Visual SLAM 성능 평가 본 프로젝트는 LiDAR SLAM으로 얻은 Trajectory를 활용하여 Visual SLAM의 성능을 평가한 연구이다. LOAM SLAM을 통해 생성된 Trajectory와 Visual SLAM의 결과를 비교 분석하였으며, APE와 ATE 지표를 활용해 성능을 검증하였다. 이를 통해 SLAM 알고리즘에 대한 이해도를 높이고 자율주행 기술에 적용할 수 있는 기반을 마련하였다.
산학연구 PilotNet을 활용한 카메라 기반 자율주차 소프트웨어 개발 본 프로젝트는 PilotNet 딥러닝 네트워크를 활용하여 카메라 기반 자율주차 소프트웨어를 개발한 연구이다. 데이터셋 불균형과 오버피팅 문제를 해결하기 위해 다양한 데이터 구성과 모델 최적화를 수행하였고, 시뮬레이션을 통해 성능을 검증하였다. 이를 통해 정확도와 일반화 성능을 향상시키며 자율주행 소프트웨어의 활용 가능성을 확인하였다.
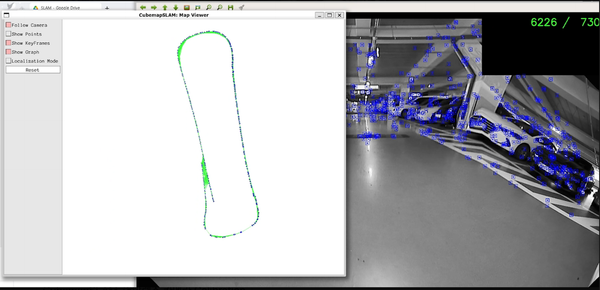
산학연구 Featured SIFT Descriptor 를 이식한 Cubemap SLAM 성능 평가 CubemapSLAM의 성능을 개선하기 위해 ORB Feature 기반 알고리즘을 보완하고, 어안렌즈 카메라 Calibration 및 SIFT Descriptor를 적용하여 공인기관 인증까지 획득한 프로젝트.