SIFT Descriptor 를 이식한 Cubemap SLAM 성능 평가
CubemapSLAM의 성능을 개선하기 위해 ORB Feature 기반 알고리즘을 보완하고, 어안렌즈 카메라 Calibration 및 SIFT Descriptor를 적용하여 공인기관 인증까지 획득한 프로젝트.

프로젝트 목표
기존 ORB Feature 기반 CubemapSLAM의 성능 한계를 개선하고, 보다 정밀한 SLAM 알고리즘을 구현하는 것을 목표로 함.
내용
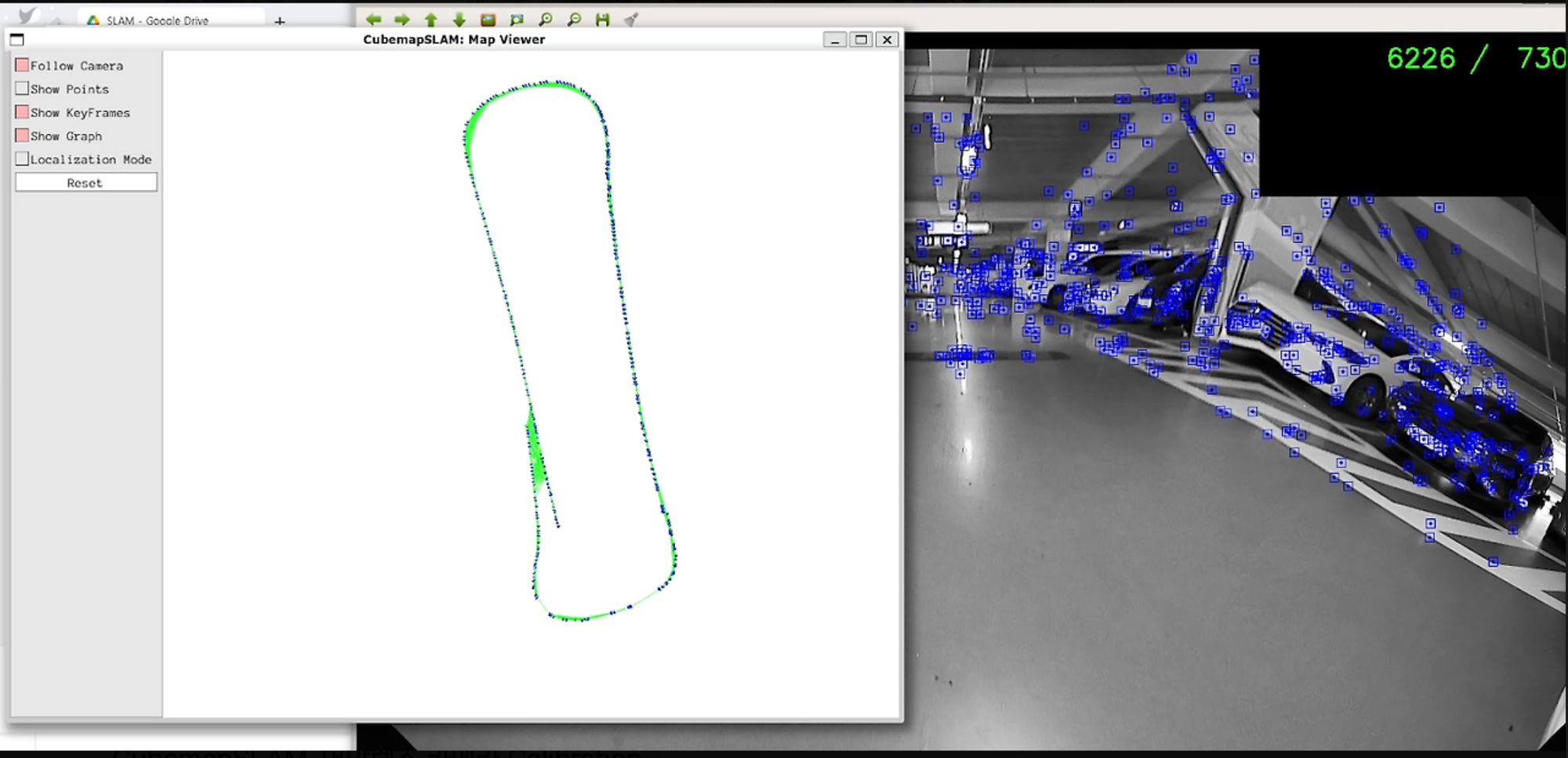
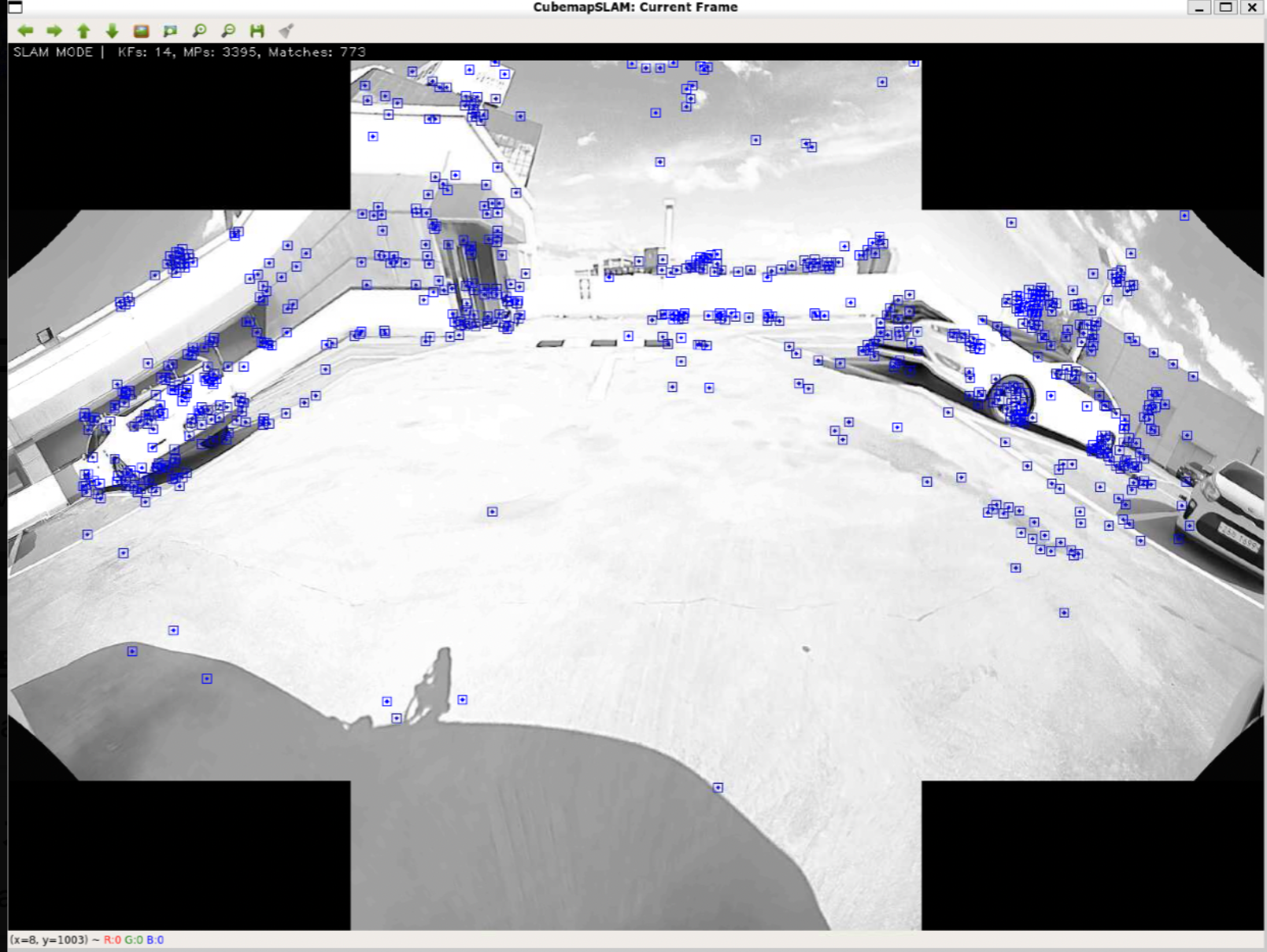
CubemapSLAM은 어안렌즈 카메라로 촬영한 영상을 변환하여 SLAM을 수행하는 기술이다. 이를 활용하면 카메라 시야각을 넓게 확보할 수 있고, 주변 지형의 특성을 효과적으로 파악할 수 있다. 본 프로젝트에서는 기존 ORB Descriptor 대신 SIFT Descriptor를 적용하고, 직접 어안렌즈 카메라 Calibration을 수행하여 성능을 개선하였다.
문제와 해결 과정
ORB Descriptor 기반 CubemapSLAM은 복잡한 환경에서 매칭 성능에 한계가 있었다. 또한 어안렌즈 카메라 특성상 정확한 Calibration이 필수적이었다. 이를 해결하기 위해 SIFT Descriptor를 이식하고, 직접 Calibration 과정을 수행하여 데이터셋을 구성하고 Trajectory를 검증하였다.
결과
CubemapSLAM의 매칭 및 추적 성능을 개선하여 기존보다 안정적인 결과를 도출하였다. 이를 통해 성능 향상을 입증했고, 공인 기관으로부터 인증을 획득하였다.
역할
LAM 알고리즘의 개선 방향을 설계하고, 어안렌즈 카메라 Calibration 및 데이터셋 구축을 직접 수행하였다. 또한 ORB → SIFT Descriptor 이식 및 성능 검증을 담당하였다.